
Overview
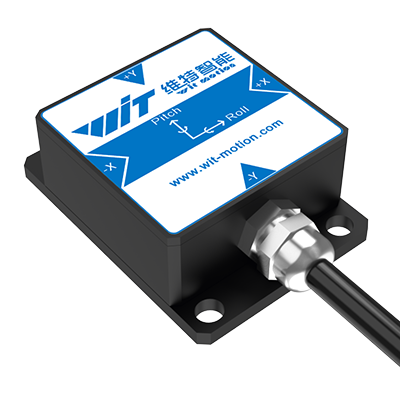
1. The module integrates high-precision gyroscope and accelerometer. Using a high-performance microprocessor and advanced dynamics solution and Kalman dynamic filtering algorithm, it can accurately output the current attitude of the module in a dynamic environment. The attitude measurement accuracy is statically 0.2°, the stability is extremely high, and the performance is even better than that of certain models. Some professional inclinometers.
2. The use of advanced digital filtering technology can effectively reduce measurement noise and improve measurement accuracy.
3. The module has its own voltage stabilization circuit, working voltage is 5~36V, and is easy to connect.
4. Maximum data output rate of 200Hz. The output content can be selected arbitrarily, and the output rate is adjustable from 0.2 to 200Hz.
5. P67 level protection, aluminum shell, strong resistance to external electromagnetic interference, stable performance, and can adapt to long-term work in harsh industrial environments.
Specifications
Parameters | Condition | Typical value |
Measuring range | ±16g | |
Resolution ratio | ±16g | 0.01(g/LSB) |
RMS noise | Bandwidth=100Hz | 0.75~1mg-rms |
Static zero drift | Place horizontally | ±20~40mg |
Temperature drift | -40°C ~ +85°C | ±0.15mg/℃ |
Bandwidth | 5~256Hz |
Parameters | Condition | Typical value |
Measuring range | ±2000°/s | |
Resolution ratio | ±2000°/s | 0.061(°/s)/(LSB) |
RMS noise | Bandwidth=100Hz | 0.028~0.07(°/s)-rms |
Static zero drift | Place horizontally | ±0.5~1°/s |
Temperature drift | -40°C ~ +85°C | ±0.005~0.015 (°/s)/℃ |
Bandwidth | 5~256Hz |
parameters | Condition | Typical value |
Measuring range | X:±180° | |
Y:±90° | ||
Inclination accuracy | 0.2° | |
Resolution ratio | Place horizontally | 0.01° |
Temperature drift | -40°C ~ +85°C | ±0.5~1° |
parameters | Condition | Typical value |
Measuring range | Z:±180° | |
| Heading accuracy | 6-axis algorithm, static | 0.5°(Dynamic integral cumulative error exists) 【1】 |
Resolution ratio | Place horizontally | 0.0055° |
Note:
【1】In some vibration environments, there will be cumulative errors. The specific errors cannot be estimated and are subject to actual testing.
Application
· Virtual reality/augmented reality, head-mounted displays
· Large-scale agricultural automatic farming
· Safety monitoring of high-altitude operations
· Drones, manned aircraft
· Industrial attitude monitoring
· Human motion tracking/capture
· Robots, autonomous guided transport vehicles
· Pedestrian navigation
· Unmanned driving/assisted driving
· Military, intelligent weapons and equipment
Download
Product InformationVideo

 Global
Global  UK
UK  Japan
Japan  Germany
Germany  France
France  Italy
Italy  Spain
Spain  Australia
Australia  Canada
Canada